Ryan S., Elenna
Ryan and I are still trying to speed up the MOVE_SPOTS state. Today, Ryan implemented new code that checks the convergence of the loops and only ramps up the ADS gains of loops that are not yet converged to help them converge faster. This appeared to work well, although the state is still slow. We are now taking the spots to the FINAL spots that the camera servos go to, instead of some old spot, so it's possible that which loops that are far off have changed.
Ryan also pointed out that the ENGAGE_ASC_FOR_FULL_IFO state is taking a while because it is limited by the convergence of the PIT3 ADS. This is likely because the POP A offset used in DRMI ASC is not quite right, so I adjusted it for pitch so the PRM should be closer to the full lock position. SDFed.

With regards to ENGAGE_ASC_FOR_FULL_IFO, the three locks that we've had after the adjustment made yesterday have made the state take an average of 4.5 minutes to get through. Before making this change, it was taking us an average of 8.5 minutes (looking at the four locks before this change), so this has made a big improvement for this state!
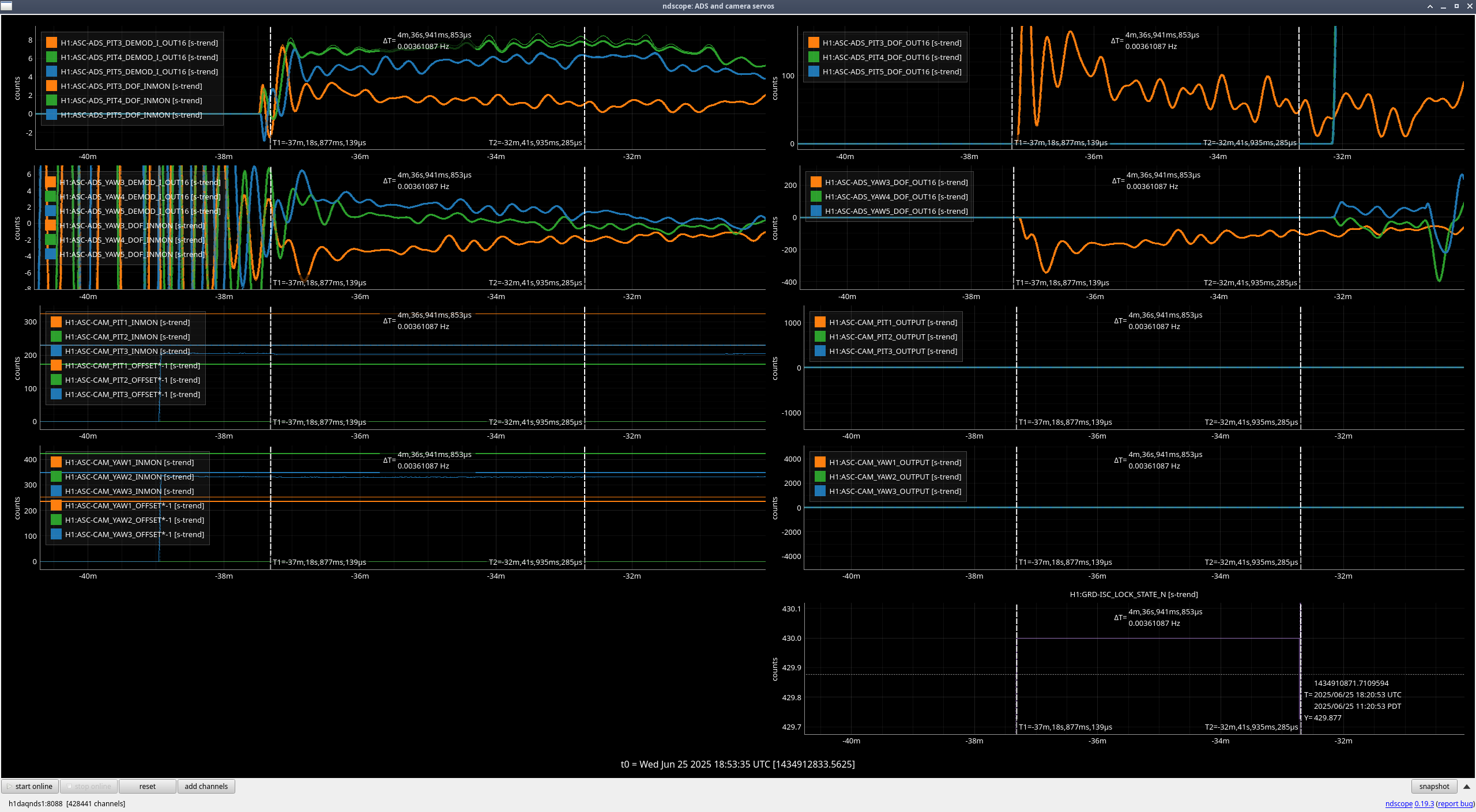
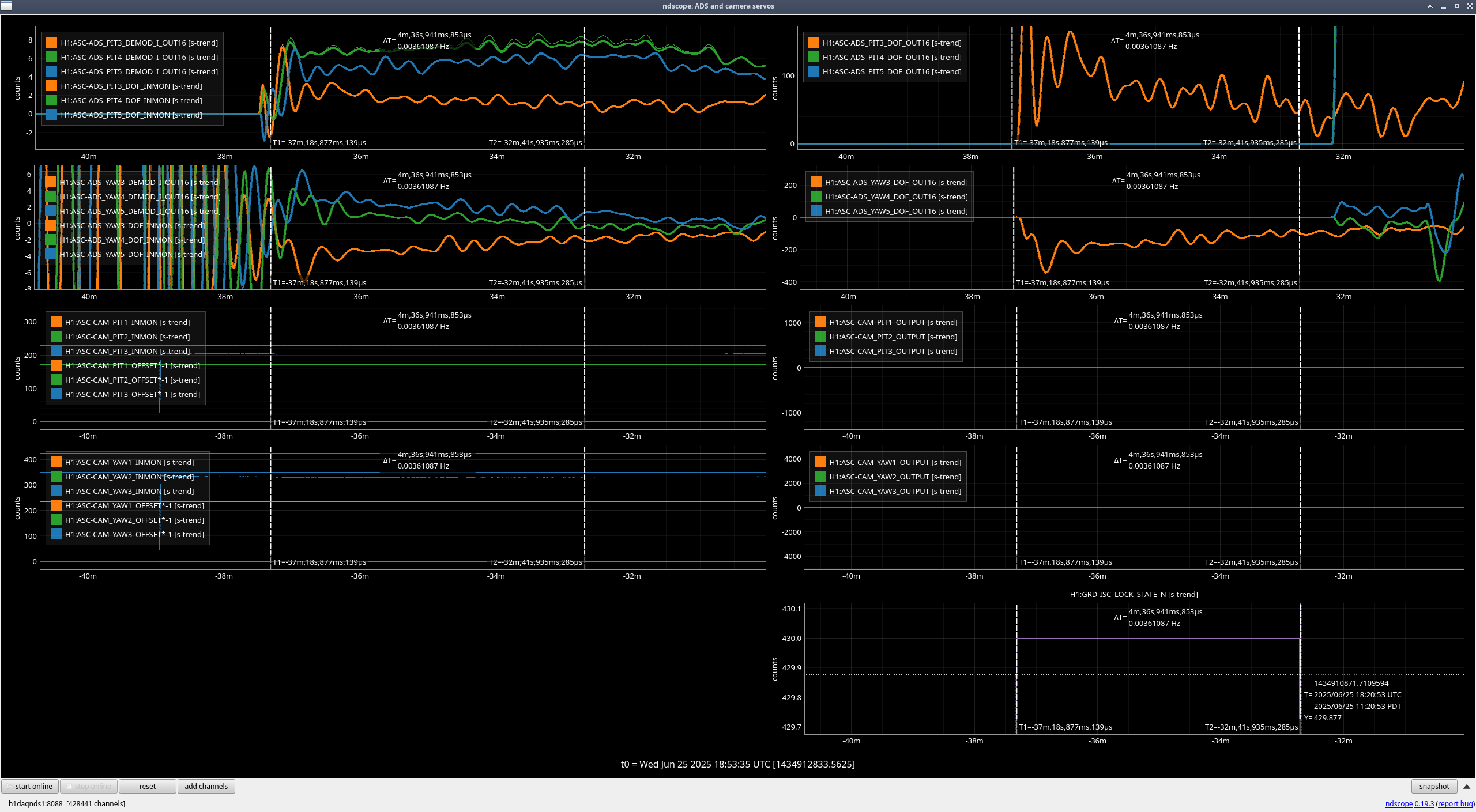
However, it looks like the main reason why this state still takes a pretty long time compared to most other states is because it's still needing to wait a long time for the PIT3 and YAW3 ADS to converge (ndscope). Here's the log from this last time that we went through ENGAGE_ASC and you can see that most of the time is waiting for ADS. The actual wait timers in there are only 50 seconds of waiting, so the rest of the wait timers (the one second timers) are just from the convergence checker.

{kind=link}
I updated the POP A yaw offset so that PRC1 in DRMI will bring the PRM closer to the full lock point and hopefully make convergence in this state faster.
