Jenne, Elenna, Oli, Ryan S, Ryan C, Matt
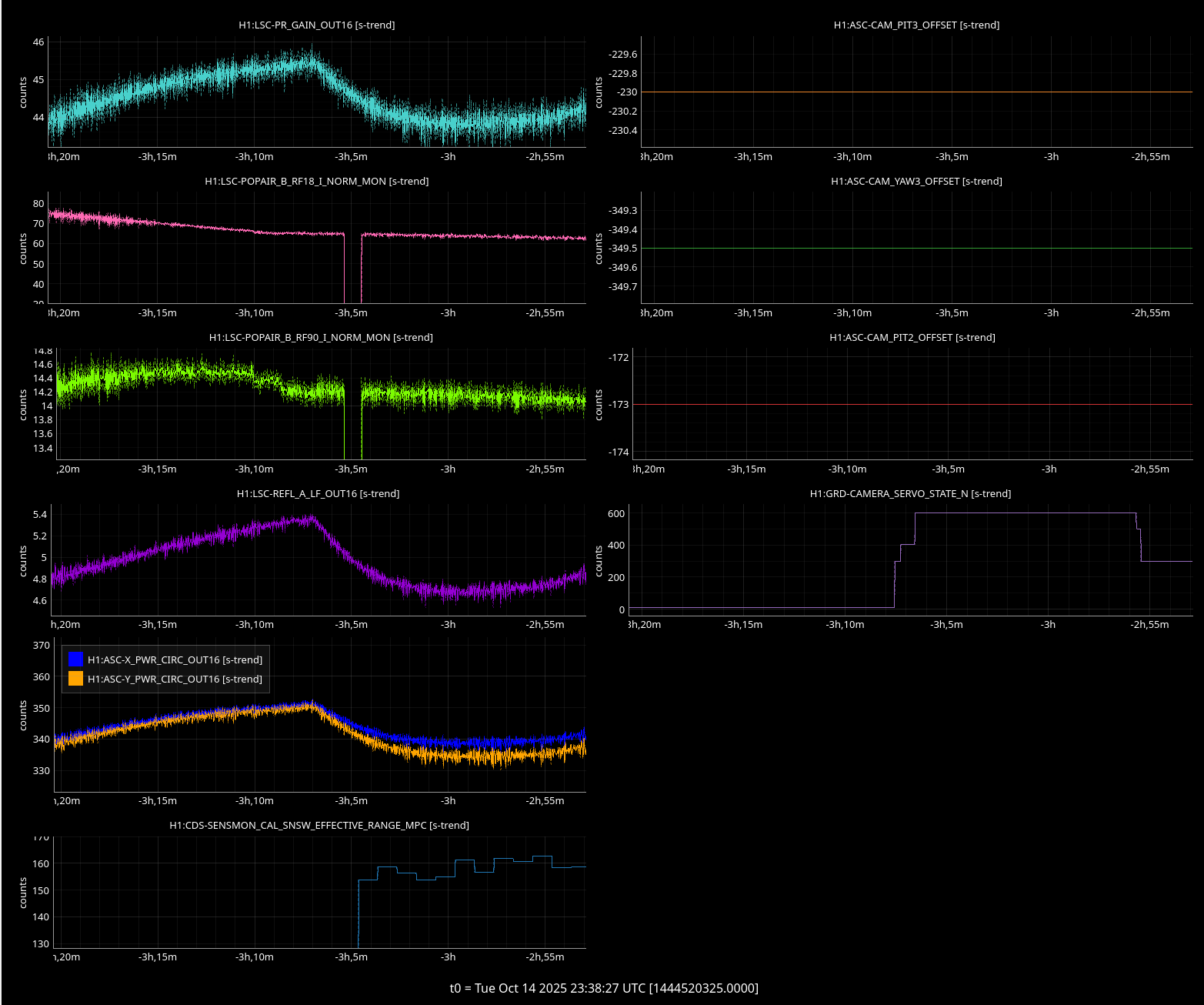
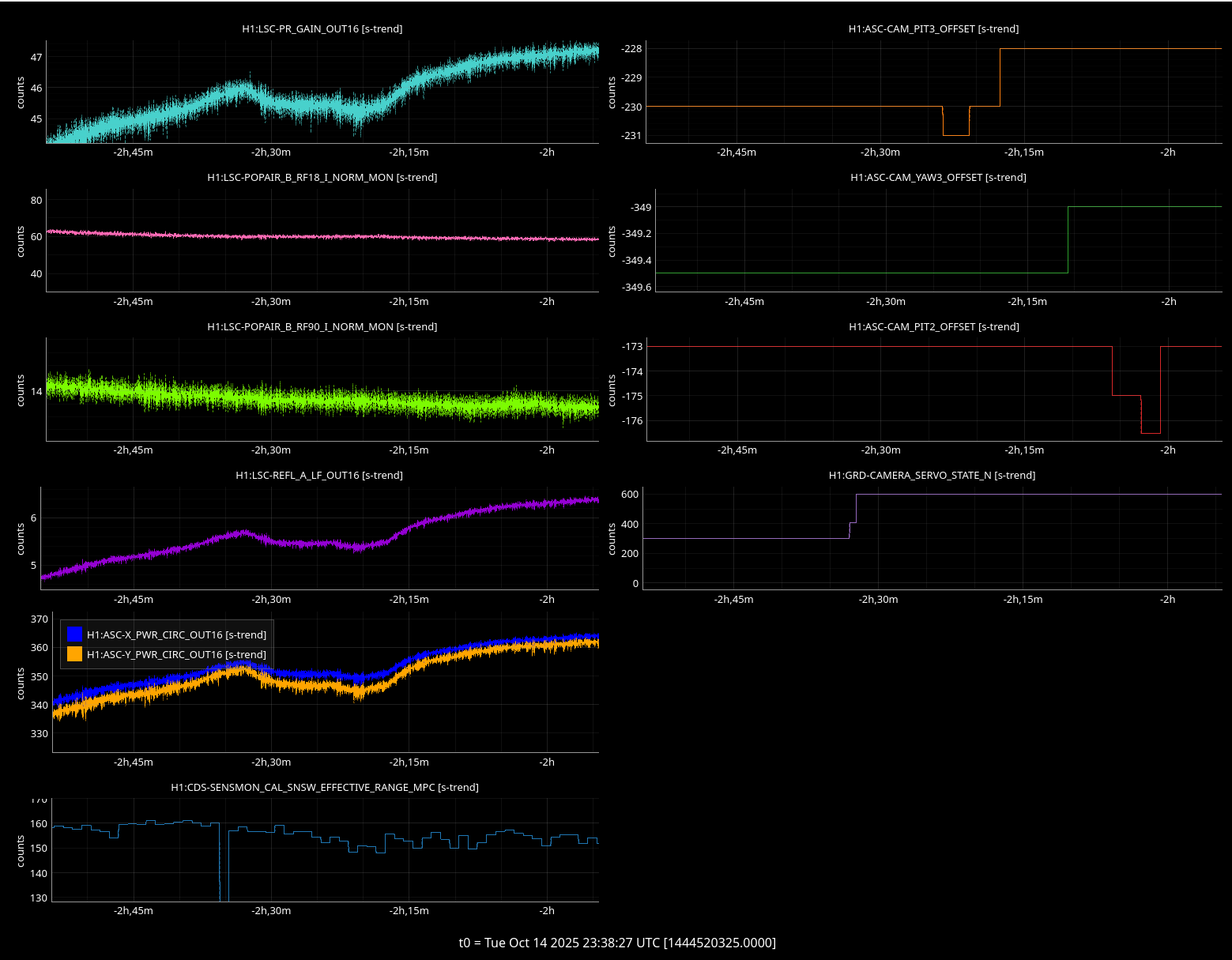
Today the engagement of the camera servos significantly reduced the buildups. The first attachment shows how the PRG, REFL LF and circ power signals dropped as the camera servo guardian engaged the cameras. After reengaging the ADS, we saw that the buildups increased again, although not to the exact same level that they were before the camera engaged. This suggested to us that the camera servos were not going to the same camera set point as before. Oli spoke to the vacuum team that had been doing work at EY and found out that the EY camera cable had been very taut and they tried to loosen it. It's possible they bumped the camera during their work.
{kind=link}
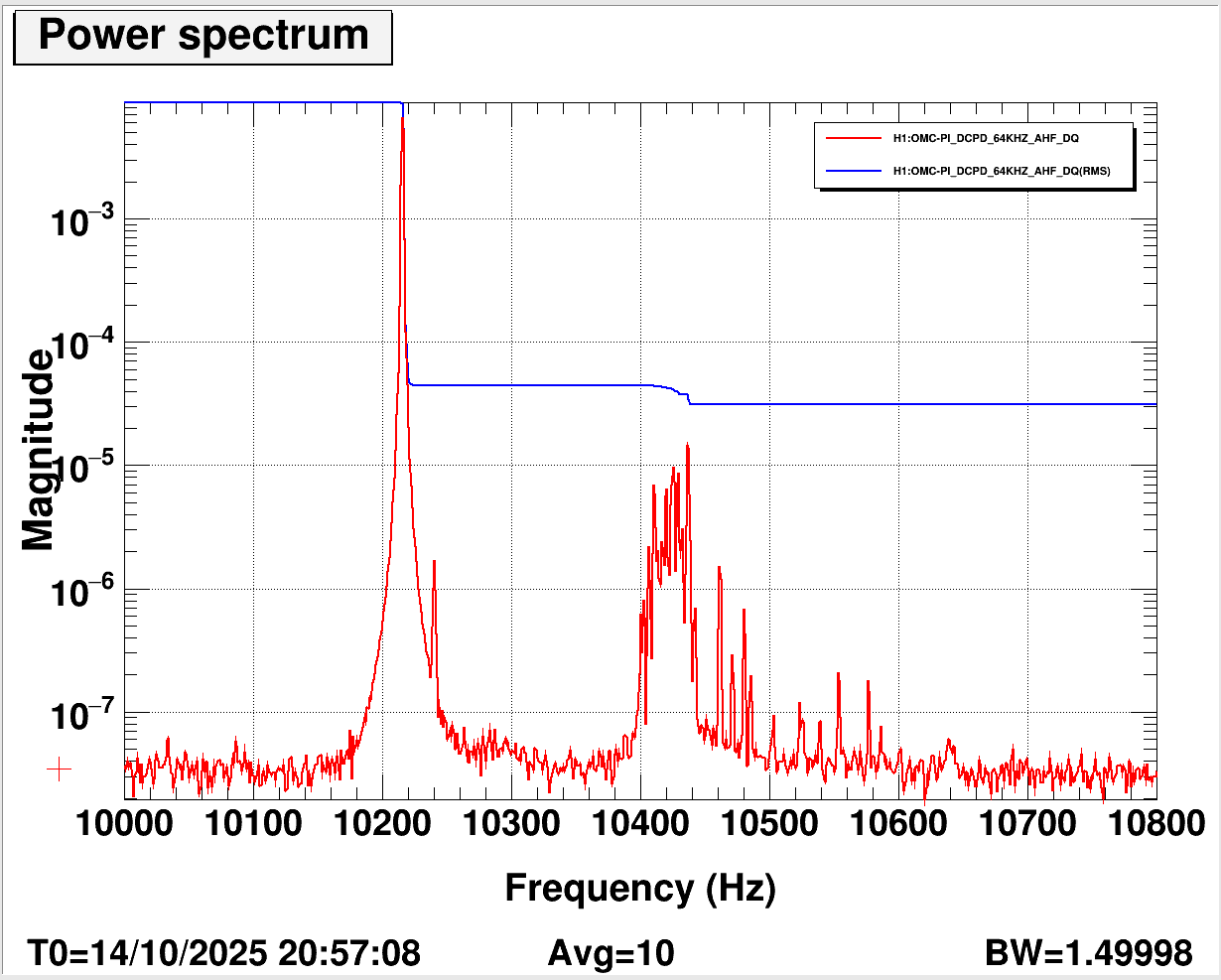
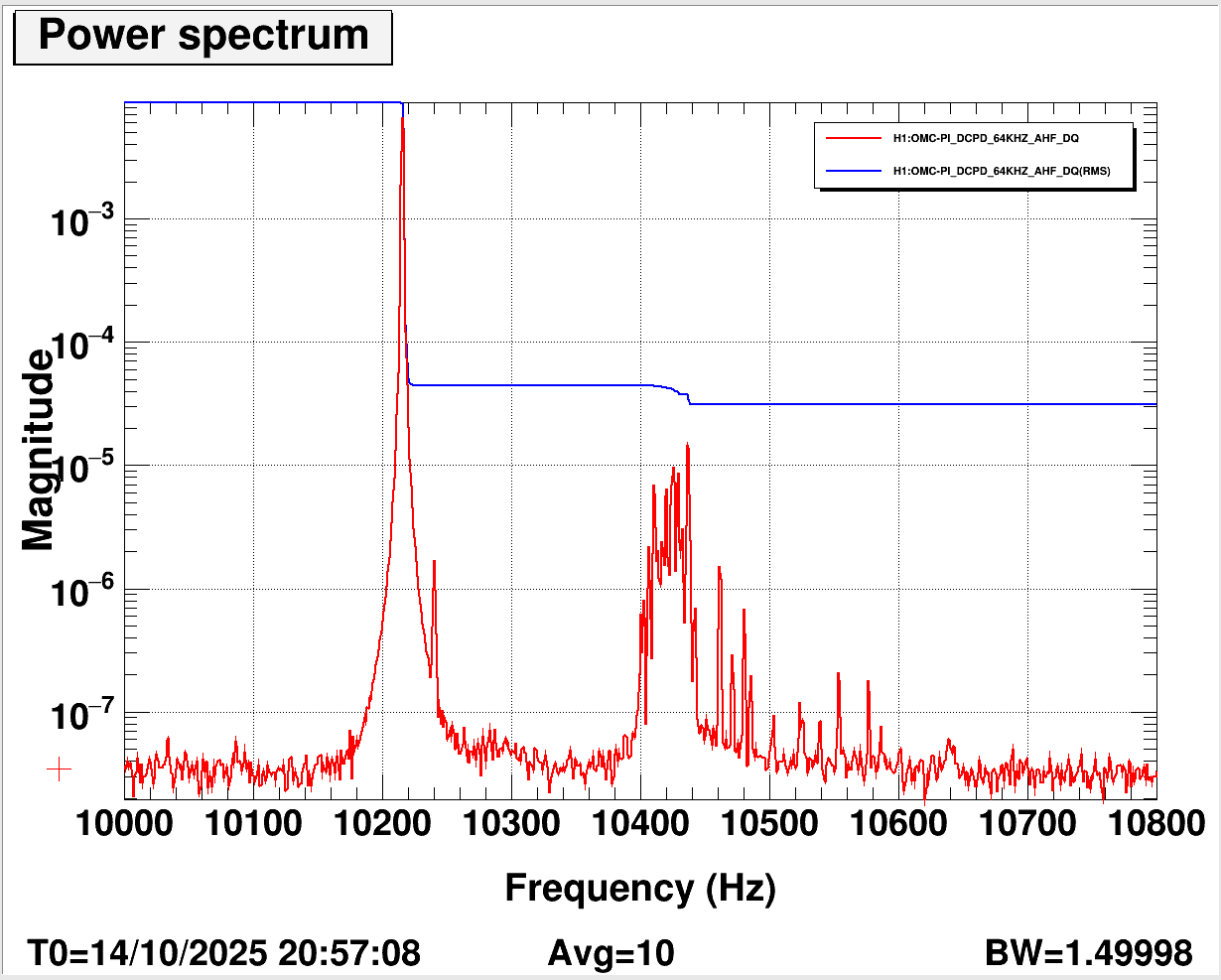
While we were considering what to do, we noticed that OMC DCPD sum was increasing rapidly. We realized this was due to a PI ringing up at 10.2 kHz. It's not a PI we usually damp, so there were no PI guardian warnings, and we didn't know how to damp it. Matt thinks this is a PI that we usually see ring up early in the lock, but with a relatively small amplitude, as the Y arm mode passes by. It usually does not need damping. We started getting DCPD saturations warnings, and we were certain we were going to lose lock. We thought perhaps that if we were in a slightly different beam position, that could cause this PI to ring up more than usual. Matt also pointed out that the CO2s had stayed on much longer for commissioning today. I had also held the IFO at 25 W before and after moving spots to perform some ASC measurements. So this was definitely not a normal locking process. However, the PI started to turn around on its own (we think), and we held the lock.
{kind=link}
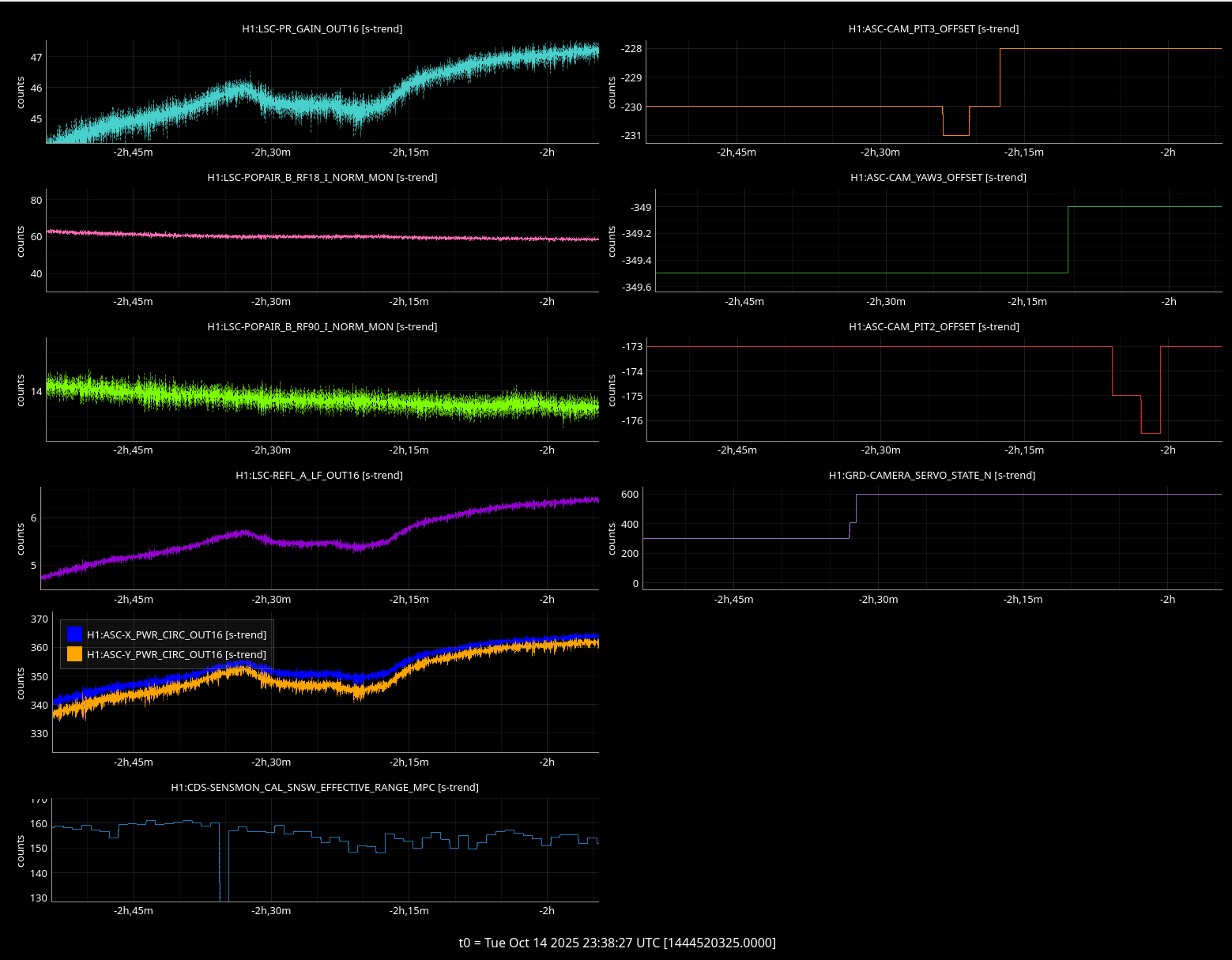
Jenne and I tried engaging the camera servos again, and saw that indeed doing so does reduce the buildups. Our thinking is that if the EY camera got bumped, the digital offset we normally use has probably changed. We also noticed that the low frequency sensitivity was slightly worse than usual, suggesting that wherever the beam was, the A2L decoupling was bad. So, we decided to move the EY camera offsets to see if we could regain the buildups, following the assumption that something had changed at EY. We looked at the camera offset value that was present when the ADS lines were on. We changed the ETMY pitch and yaw offset values. This resulted in a 2 count change for ETMY pitch, from -230 to -228 and a 0.5 ct change in yaw from -349.5 to -349. Changing to these new offsets increased the buildups again. We also saw that the ADS had taken the ETMX camera error signal to a slightly different offset, so we tried changing the ETMX pitch value, but this had no change on the buildups so we reverted.
{kind=link}
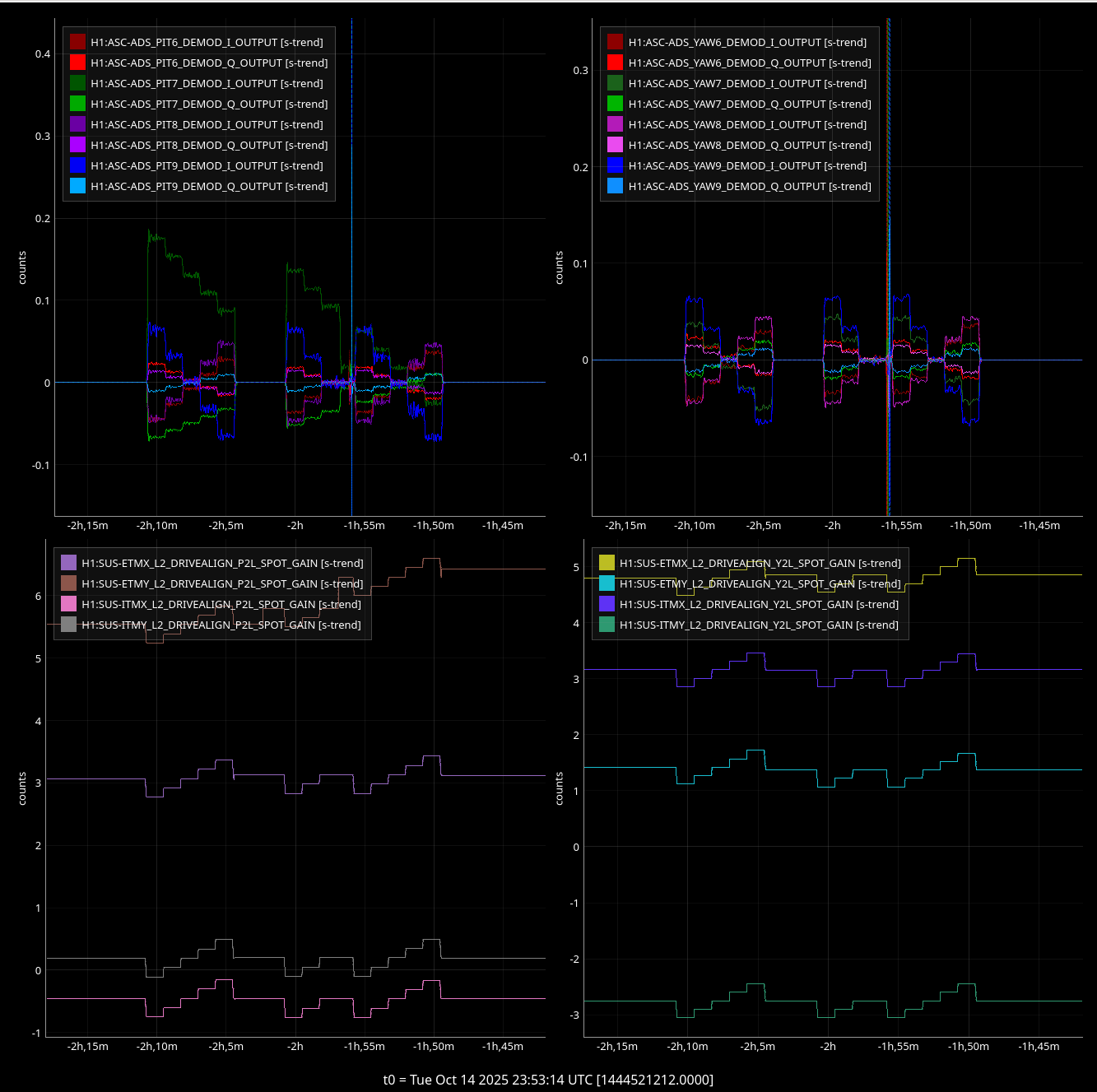
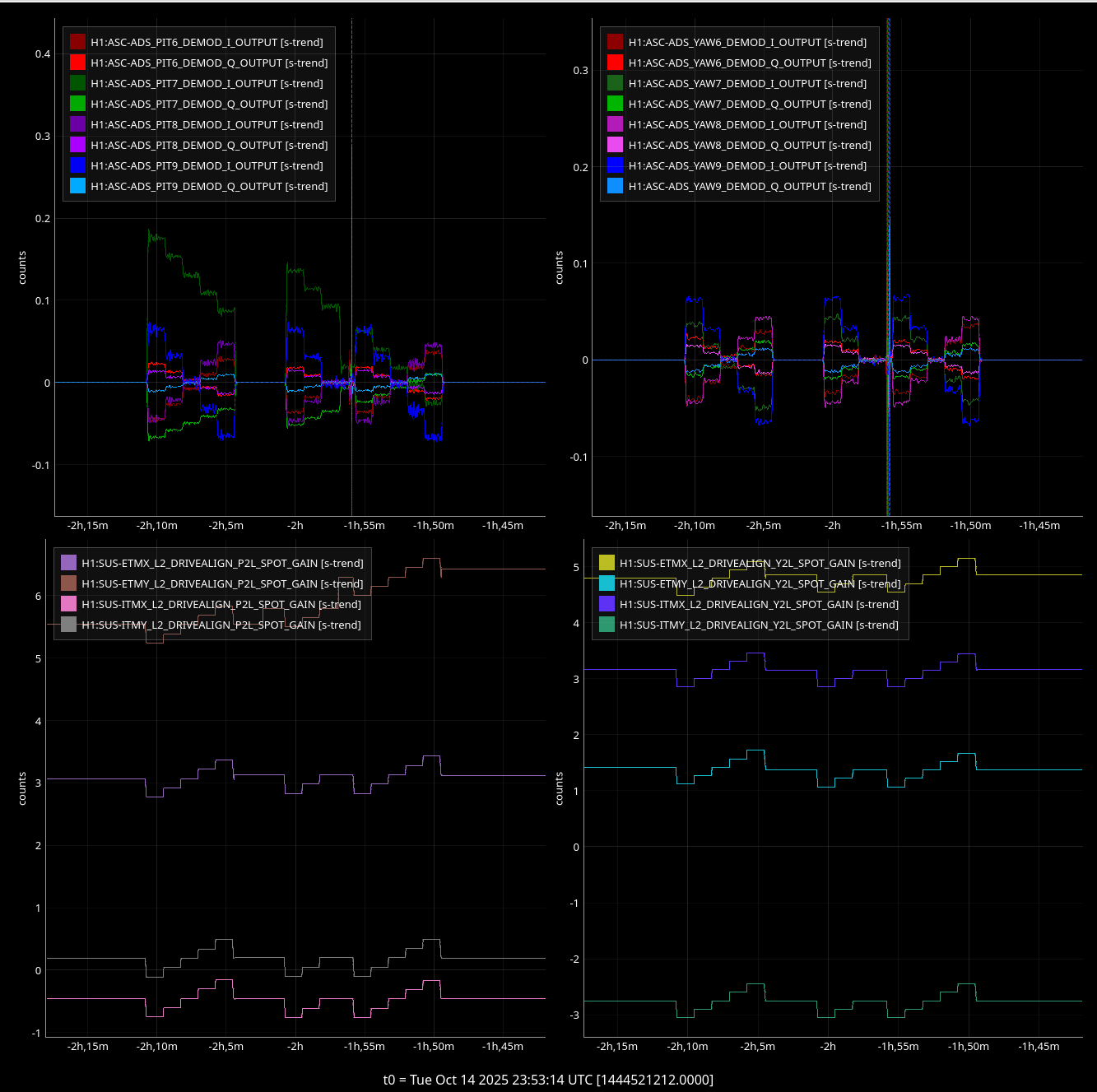
Even though this whole process was designed to bring us back to the nominal ETMY spot position, it appeared that the low frequency sensitivity was still bad, I ran the A2L script. I watched TJ's A2L script scope and noticed that the A2L starting value for ETMY pitch was very far from zero, so the script never took the A2L value to the minimum. Jenne and I ended up guesstimating what a good A2L value was so that the starting point would be close enough to the minimum that the script steps would go there. This results in a significantly different A2L gain than before for ETMY pitch. I copied the tables below for each A2L script attempt. The nominal ETMY pitch value before was 5.62 and now it is 6.43. According to the a2l lookup script, this is a 3.8 mm change in spot position. The ETMX A2L gains also updated slightly, as you can see below. I did not make any changes to the gains where the diff between final and inital was 0.01 in magnitude.
{kind=link}
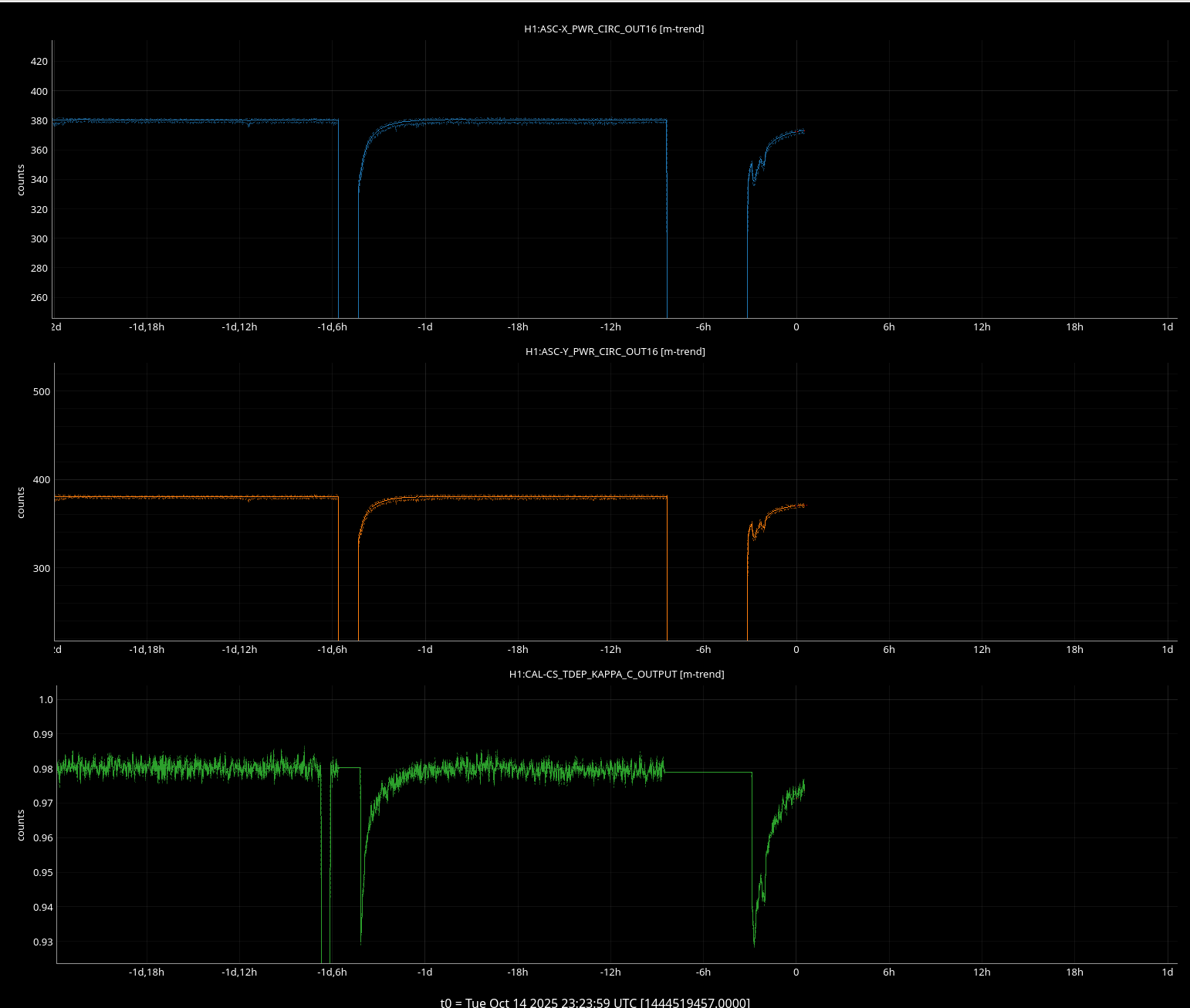
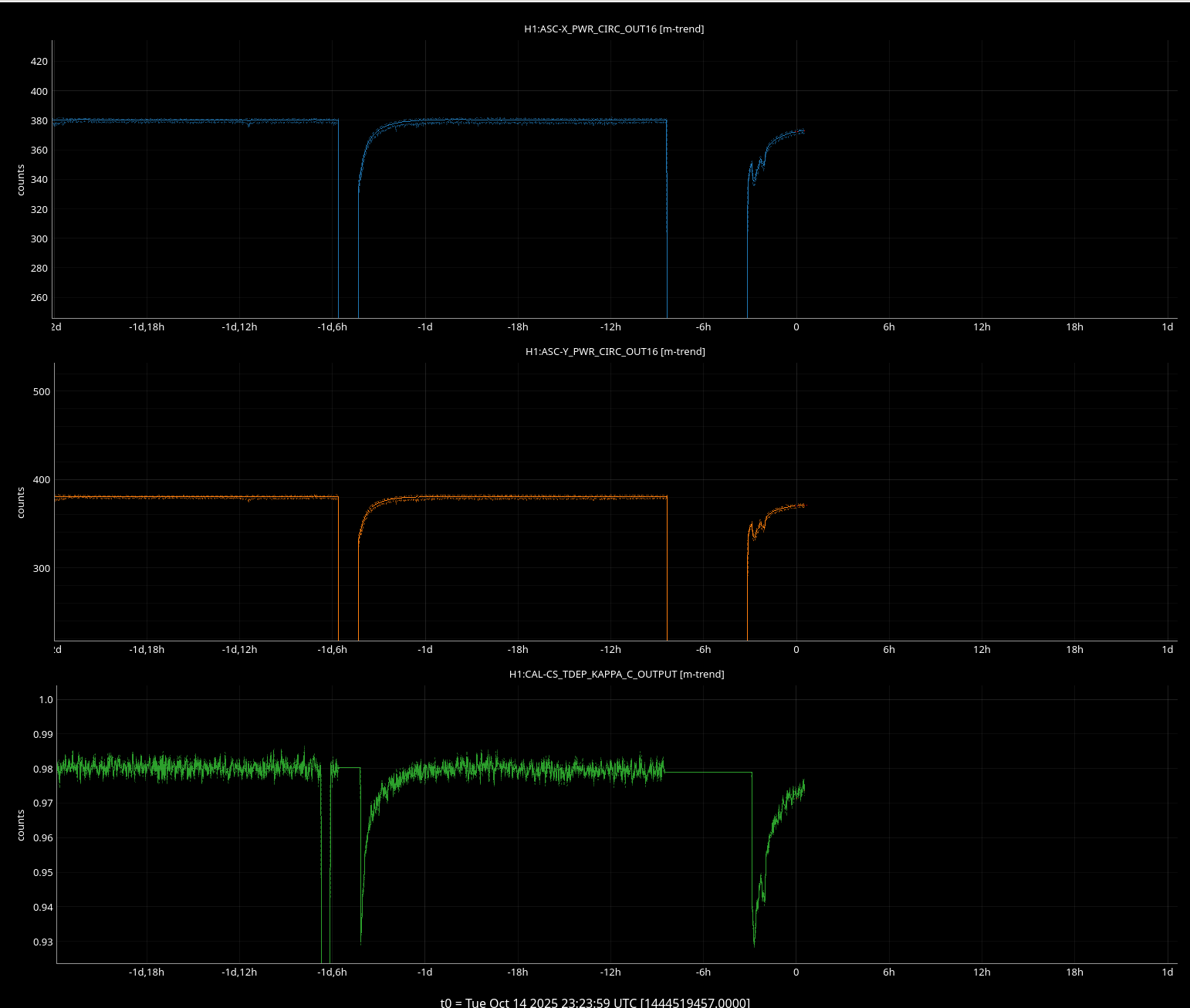
Now that we have been in NLN for 3.5 hours, the buildups still seem lower than usual. Circulating powers usually read about 382 "kW", but they are currently reading about 374 "kW". Kappa C is also 0.975, and it is usually 0.98. I'm not convinced that the beam is in the correct spot.
{kind=link}
Jenne suggested that we could try going back to the old A2L gains, and then adjusting the camera offset until the ADS lines are minimized, which I think is a good idea. However, I do want to point out that our range is currently reading 160 Mpc on sensmon clean.
The new ETMY camera offsets and the updated A2L gains are saved in lscparams and loaded in ISC_LOCK. First try:
| Optic | DOF | Initial | Final | Diff |
|---|---|---|---|---|
| ETMX | P | 3.07 | 3.13 | 0.06 |
| ETMX | Y | 4.79 | 4.85 | 0.06 |
| ETMY | P | 5.54 | 5.54 | 0 |
| ETMY | Y | 1.42 | 1.37 | -0.05 |
| ITMX | P | -0.45 | -0.46 | -0.01 |
| ITMX | Y | 3.16 | 3.15 | -0.01 |
| ITMY | P | 0.19 | 0.2 | 0.01 |
| ITMY | Y | -2.75 | -2.75 | 0 |
Second try:
| Optic | DOF | Initial | Final | Diff |
|---|---|---|---|---|
| ETMX | P | 3.13 | 3.12 | -0.01 |
| ETMX | Y | 4.85 | 4.85 | 0 |
| ETMY | P | 6.3 | 6.43 | 0.13 |
| ETMY | Y | 1.37 | 1.37 | 0 |
| ITMX | P | -0.46 | -0.46 | 0 |
| ITMX | Y | 3.15 | 3.16 | 0.01 |
| ITMY | P | 0.2 | 0.19 | -0.01 |
| ITMY | Y | -2.75 | -2.75 | 0 |