Jennie W, Dave B,
Jeff and I put in a bypass in the h1ascimc model (see alog #88465) so we could put in the simulink infrastructure to switch between using the PSL periscope PZT as part of the IMC control or as part of the JAC control.
At the moment the switch 'H1:ASC-IMCJAC_PZTOUTSW' is set to ON which should let the IMC servo use the PZT.
However the logic I put in will not switch the feedback to take inputs from the JAC servo if I turn the switch off.
{kind=link}
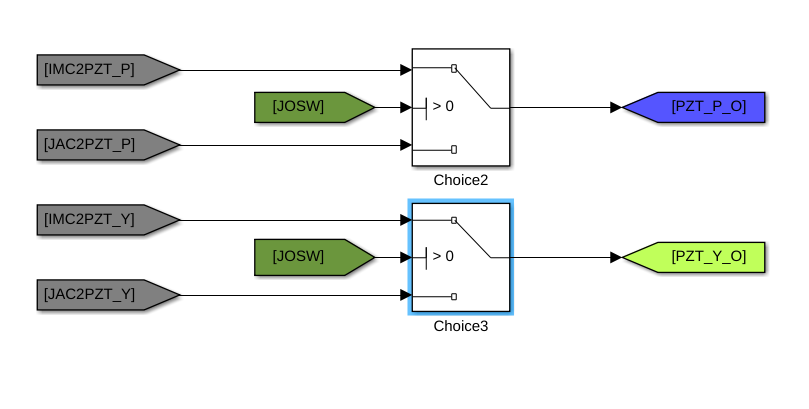
This is because Choice 2 and 3 in the picture are set to pass their first input if the switch output is '>= 0', so whichever state it is in the IMC PZT output will be sent to the DAC.
I have changed these choices to >0 so that the top input (IMC PZT output signal) will be sent to the DAC if the switch is 1 and the bottom input (JAC PZT output signal) will be sent to the periscope otherwise.
I committed the changed /opt/rtcds/userapps/release/asc/h1/models/h1ascimc.mdl to the svn.
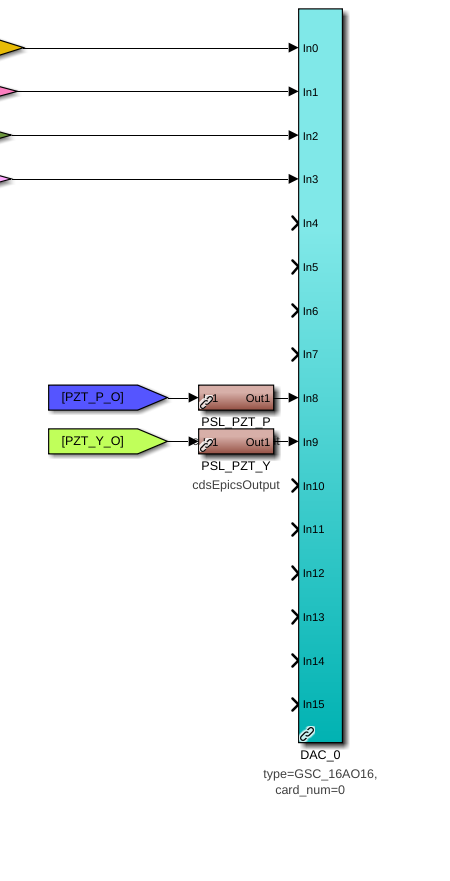
I also added two cdsepicsOutput blocks (ASC-PSL_PZT_P and ASC-PSL_PZT_Y) before the DAC outputs going to the PZT to check what the model is sending to the PZT which will help us double check the switch between IMC and JAC signals works correctly.
See screenshot attached. I rebuilt h1ascimc.mdl and committed it to the svn at userapps/asc/h1/models.