J. Oberling, P. Thomas, R. Short
TLDR - Following the power outage(s) over the weekend, we've successfully restored the PSL.
Monday morning, Jason started by turning back on the benchtop power supply behind the PSL racks in the LVEA which powers CB2 and then restarted the Beckhoff computer in the diode room (we've seen in the past that the Beckhoff computer needs everything to be powered on before it boots so that it can "see" everything). However, even though the EPICS IOC auto-started when the computer came up, the PLC did not, so we were unable to bring the system up at first. I was able to find and launch the correct PLC (which, for our future reference is in the "Projekt_LIGO_240124" folder), but we noticed after the GUI came up that we were missing the amplifier PD WD, one of the newest additions to the software. Thinking we had an old version of the software somehow, we called in Patrick, who reminded me that instead of just starting TwinCAT in run mode, I should have also logged in and started the PLC to pull in all the updates to the code. This brought the Beckhoff computer back to full functionality, and we were able to bring the laser up without issue after clearing the site laser interlock (which wouldn't clear until the Beckhoff computer was functional). As usual, our calibration settings and operating hours for the NPRO, amps, and chiller were lost with the computer reboot, so we found the last saved screenshot of the settings table we took after the last outage (alog88368) and used it repopulate the table. The operating hours were all fixed also since we could trend back what they were before the outage. A new screenshot of the settings table is attached.
Relocking the PMC went without issue, and it's now been coming up to temperature since Monday with the transmitted and reflected powers slowly settling out. I can tell by the camera spots and the lower transmitted power that some alignment is needed into the PMC, which we can do eventually. The PMC relocked at a temperature a couple degrees cooler than before, which we've seen before, so this slightly different operating point isn't too surprising.
Trending the enclosure temperatures shows that the environmental controls seem to have come back no different than before the outage.







































{kind=link}
{kind=link}
{kind=link}
{kind=link}
J Kissel, T Shaffer
All plots are in the accelerometer axis as defined below for each test. The measurement numbers were just for my own organization within the B&K software.
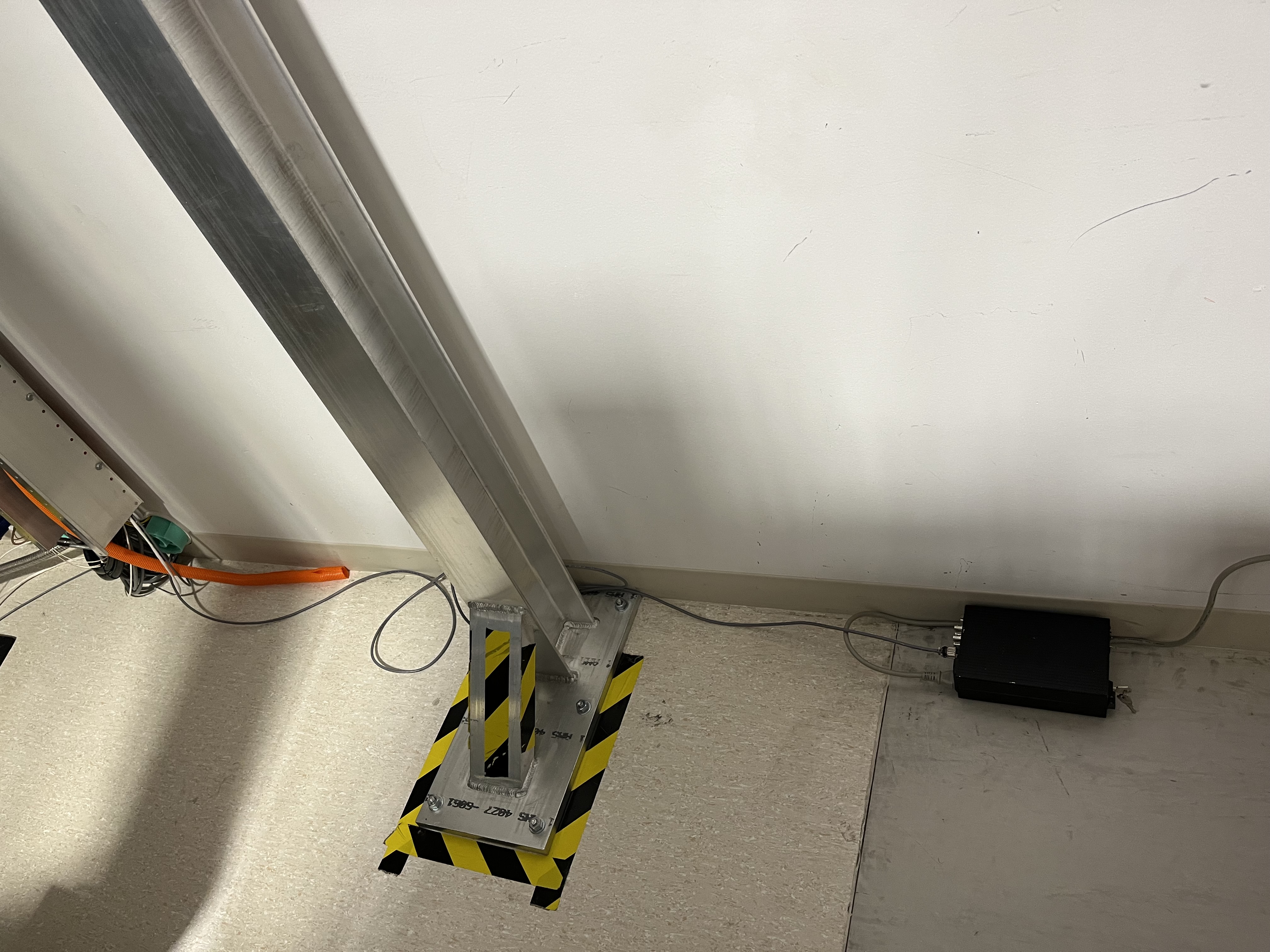
ISIJ
We did this in two stages, one set with the D2500030 cylindrical shroud and one set without. The accelerometer was mounted on a bolt hole below the ISIJ on the HAM face (photo).
The shroud has clear resonant peaks at 137, 196, 314Hz. It was ultimately decided to leave this piece off for now.
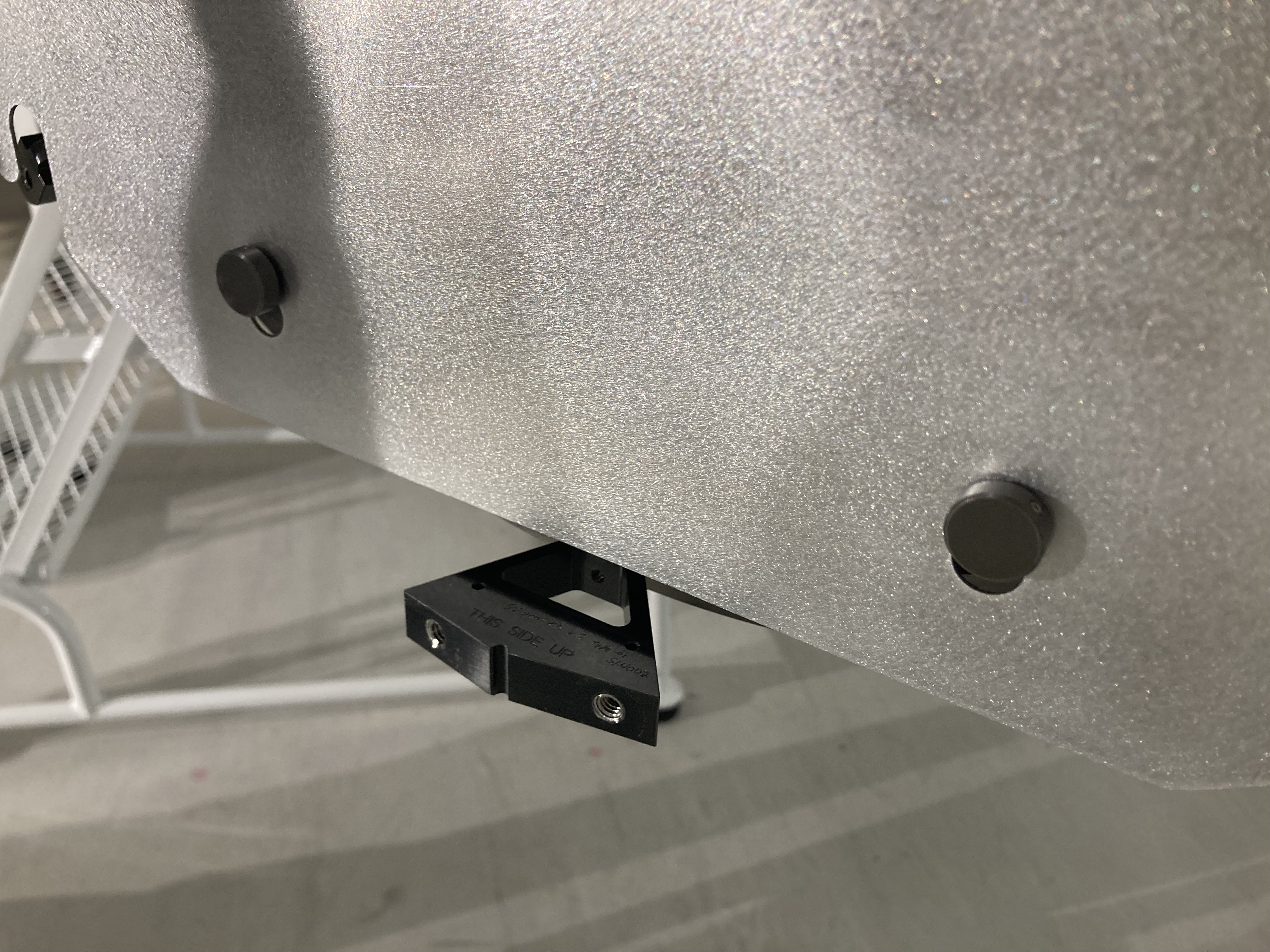
Below Table Baffle
Measuring the central below table baffle (D2600042) with the accelerometer mounted on the L bracket (D1700264) on the outermost bolt hole (photo). The accelerometer axis X,Y,Z = IFO -Z,Y,X.
Meas 1 - First hit IFO +X (+Z acc) bottom of L bracket - attachment 4
Meas 2 - hit in -Y IFO (-Y acc) on L bracket - attachment 5
Meas 3 - hit in +Z IFO (-X acc) L bracket bottom. Note that the bracket is tilted in the IFO -X direction. - attachment 6
There is a small peak at 87Hz.