Vicky, Camilla, Naoki, Sheila
After our first trial of running ADS for OMC 3 MHz to align ZM5+6 (80114), we came up with a hypothesis of why this didn't maximize squeezing. We are trying to maximize the 3MHz Q signal, while the I signal is servo's. Changing the demod phase of the 6MHz rotates the IQ ellipse, in general anti-squeezing is at the demod phase where Q is maximized and squeezing is near the phase where Q is minimized, but because the 3MHz is off resonaonce in the OPO the best squeezing is slightly away from the minimum.
If alignment changes didn't change the squeezing angle (for a fixed demod phase), then running ADS to maximize the 3MHz Q signal should be increasing the throughput of 3MHz, which would mean that the OPO is better aligned to the OMC. But, we see that changing the alignment changes the squeezing angle. This means that moving the alignment to maximize RF3 would only work as an alignment servo if the RF3 demod phase were updated to keep the squeezing angle constant.
So our plan for today was to run the ADF servo to feed back to RF6 demod phase and keep the squeezing angle correct while we run ADS to adjust the alignment of ZM5+6. The servos worked fine, but again didn't give us good squeezing. We think this is because the ADF servo didn't actually do a good job of keeping the squeezing angle set to minimize shot noise.
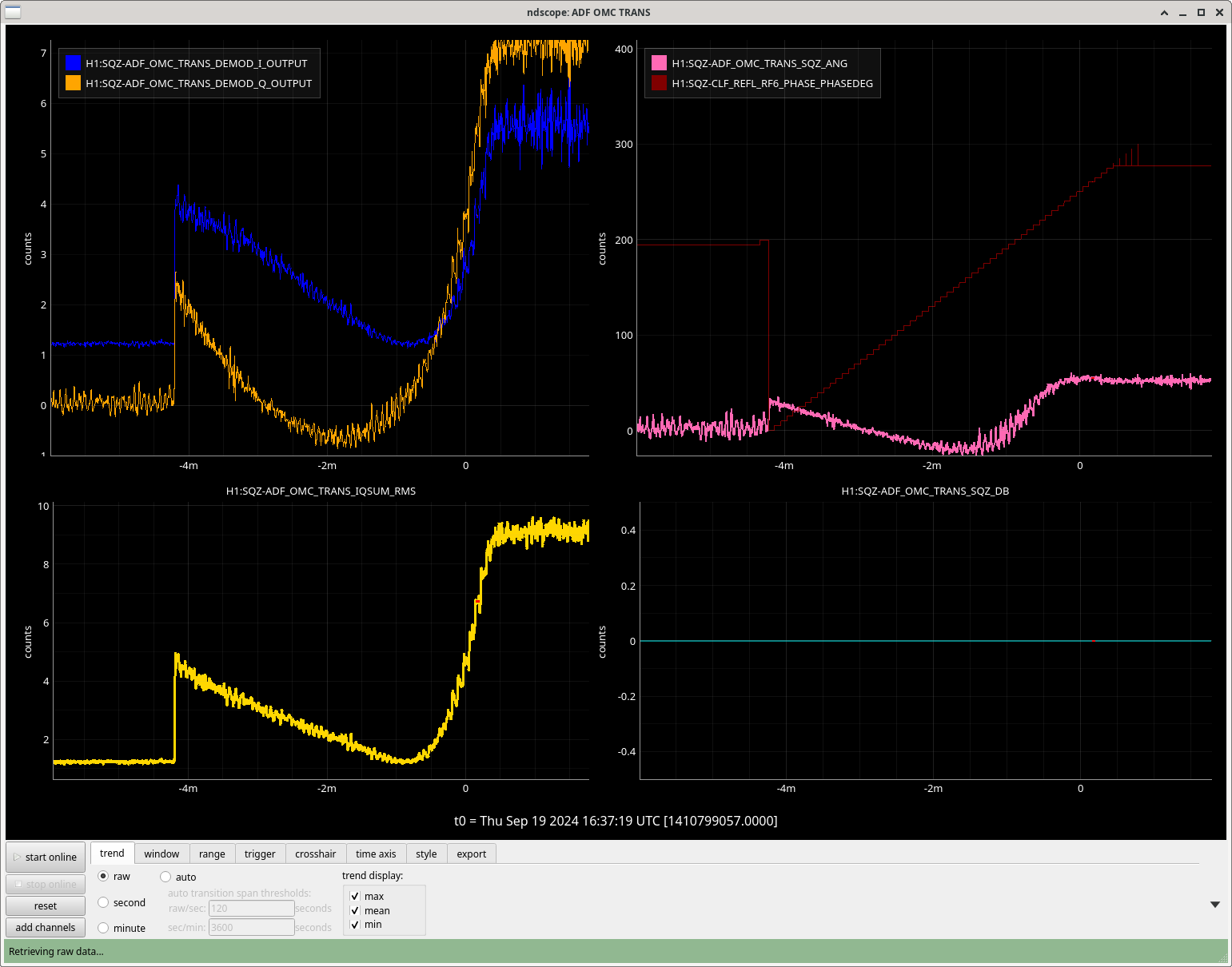
We ran ADS for 3MHz Q to ZM5+6 and the ADF servo to adjust RF3 demod phase based on H1:SQZ-ADF_OMC_TRANS_SQZ_ANG, which moved ZM5 pitch by -19, ZM5 Y by +3urad, ZM6 P by -135 urad, and ZM6 Y by -5 urad, and moved H1:SQZ-CLF_REFL_RF6_PHASE_PHASEDEG by -45 degrees. After this finished we ran SCAN_SQZANG to readjust the squeezing angle (RF6 MHz) to minimize shot noise at 300 Hz, which indicated that the demod phase change we needed to compensate for the alignment shift was actually only 25 degrees. So, thinking about ZM6 P, we see that an alignment would require a 0.2 degree shift in demod phase, and also causes a similar sized error in the squeezing angle read out by the ADF.
After all this, we went back to our best squeezing by running scan alignment and scan sqz angle, then moved ZM6 by -100 urad and re-ran scan sqz angle, we needed to shift the 6MHz demod angle by -16.4 degrees.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}