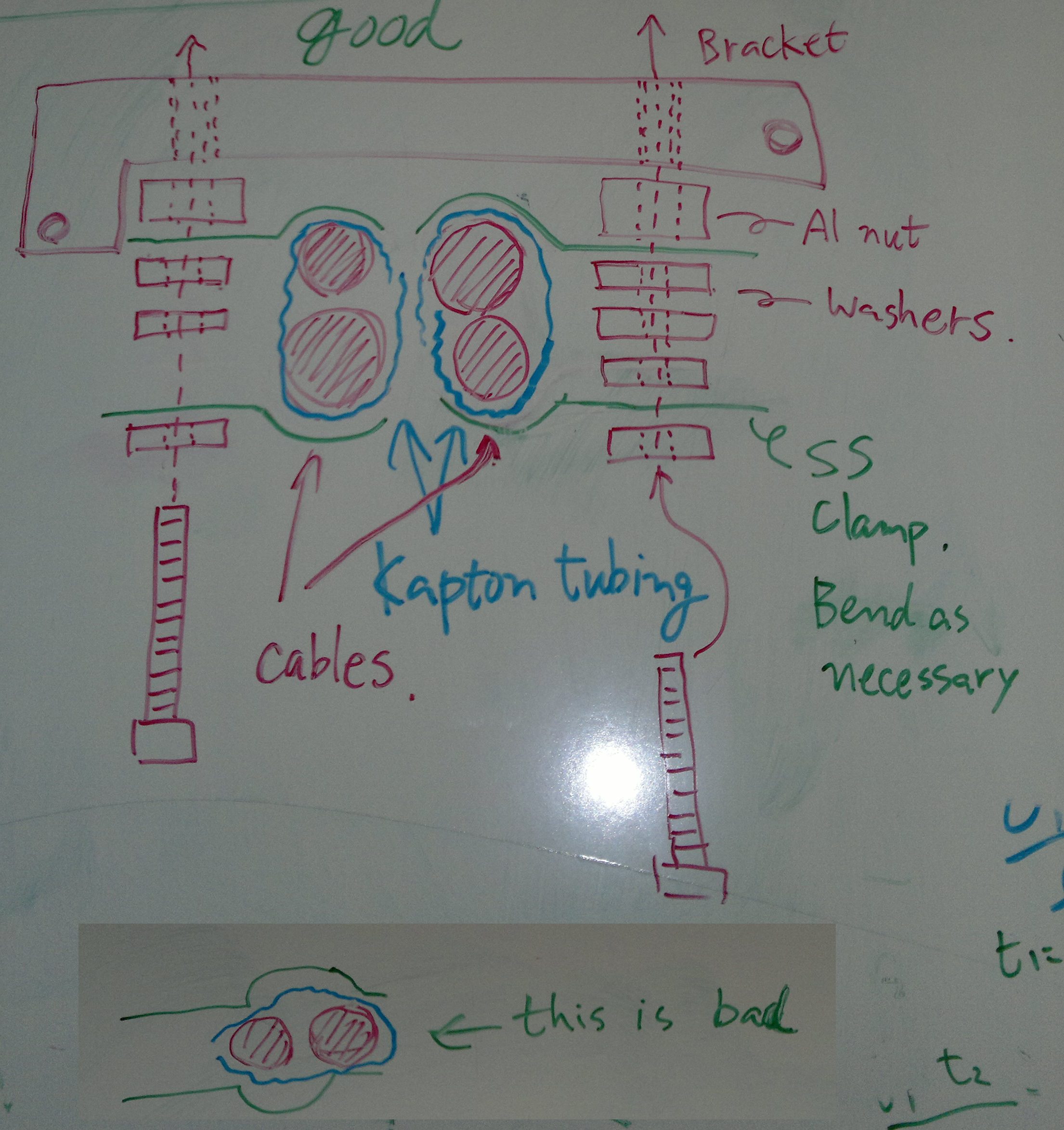
Spent an hour to play with the cable clamp bracket, and improved on Cheryl's idea to use metal clamps with kapton tubings (first picture).
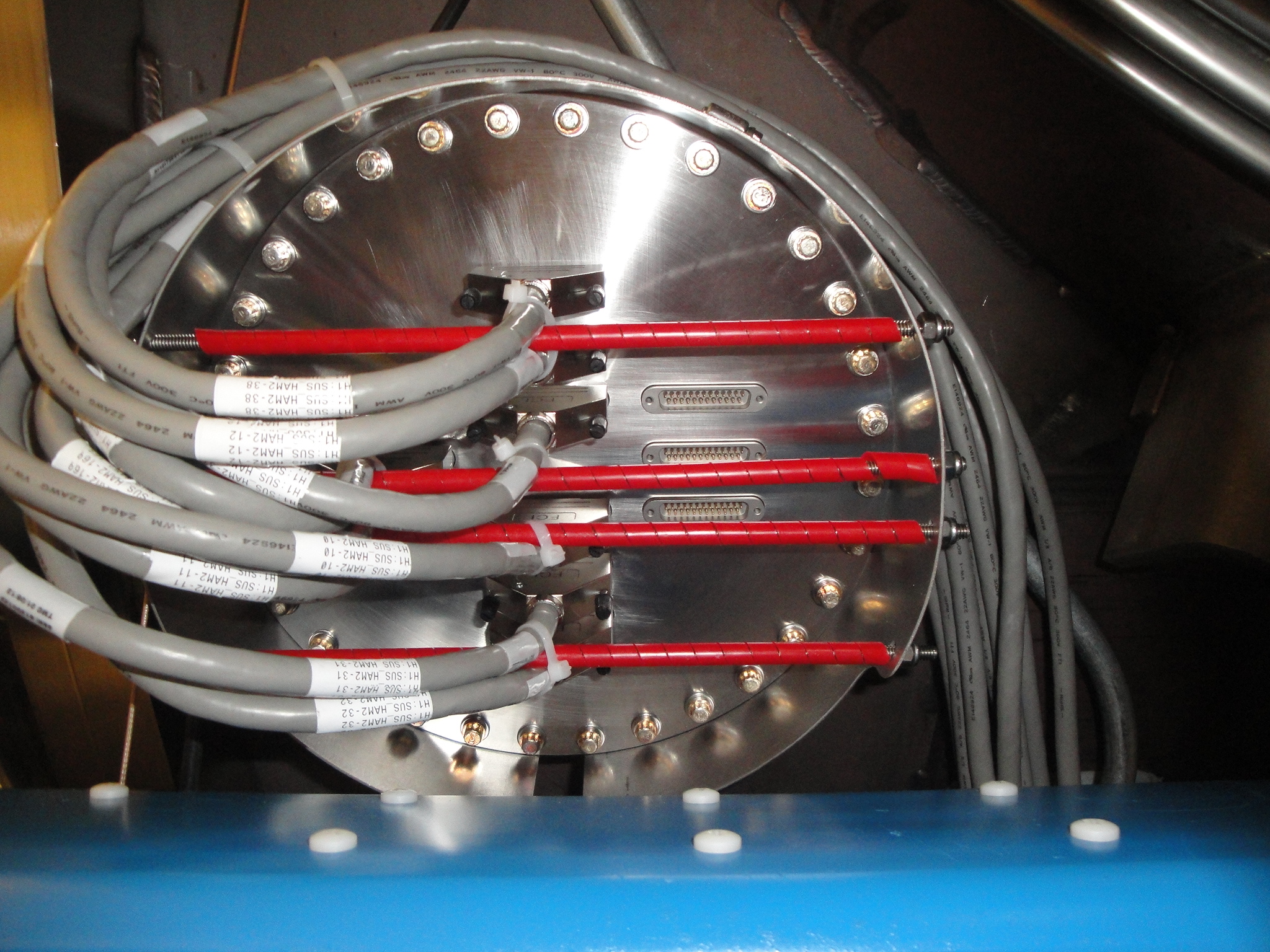
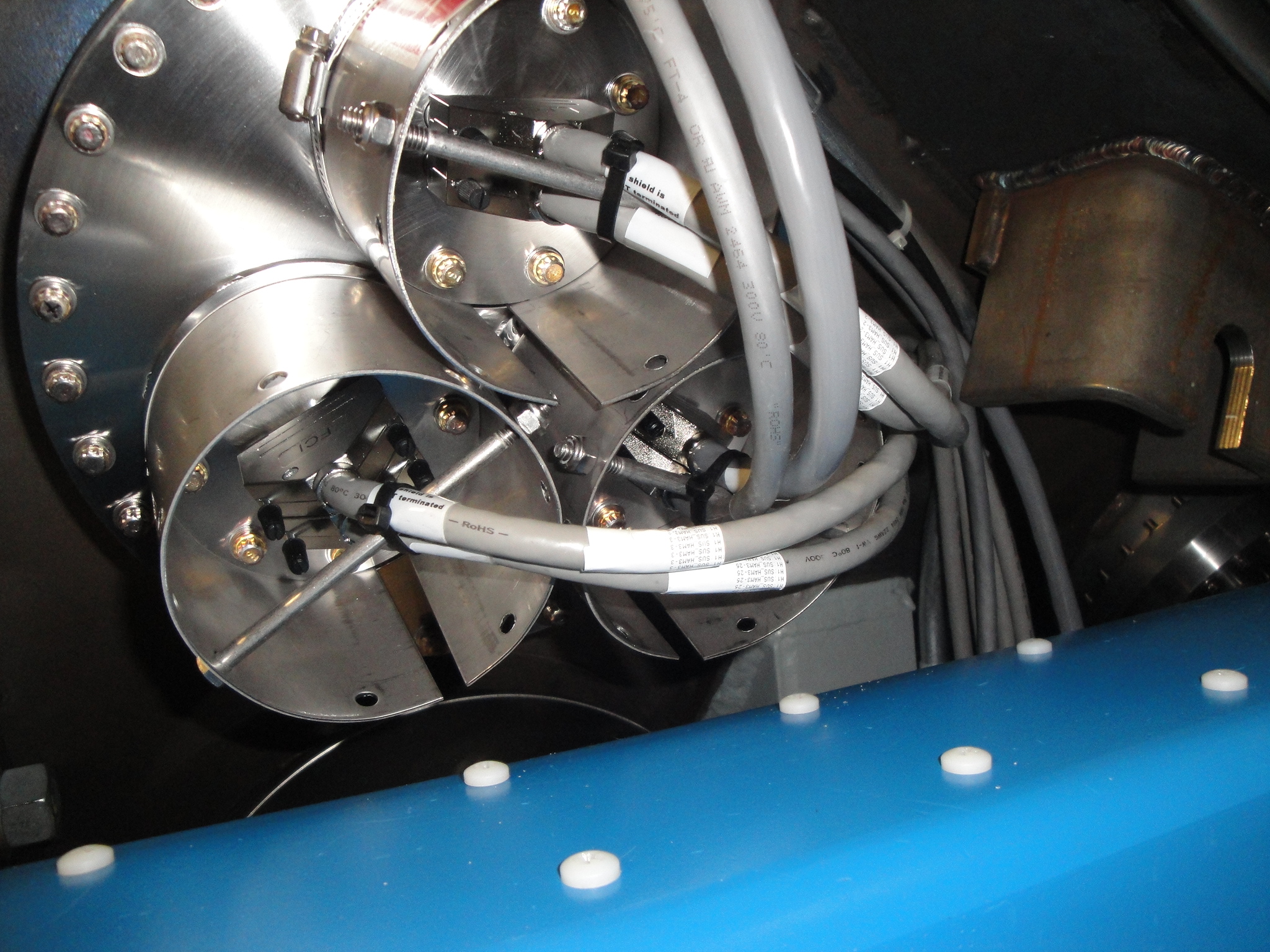
One D1000921 (thicker, for pico, beam diverters) and one D1000921 (thinner, for QPDs) are wrapped with kapton tubing and clamped using a pair of metal hold down clamps (second picture). Two such pairs are made (third picture) and they sit next to each other. I also tried making thin-thin and thick-thick pair, but it didn't work well. Thin--thin is easy to rotate between the clamps and goes to "bad" position in the first picture easily, losing any clamping pressure.
Extra care should be taken to align things properly, and the number of washers should be chosen such that everything is snug but not too tight when the bolts are tightened. When you pull the cable it should slide inside the tubing, but it should not slide on its own.
With too few washers, it's easy to put too much pressure on the cables which promotes short circuits as the soft teflon insulation is broken. With too many washers, even if it feels OK at first, it is easy to rotate the cables in the clamps so the cable pair goes to "this is bad" position in the first attachment and the thinner cable becomes loose.
Note that I'm abusing a 1/4-20 aluminum nut as a poor man's washer. This is because the normal washers we have is too big and interferes with the curved part of the metal clamps, and we have a limited supply of smaller washers. It's working OK, when I tightened the bolts there's no loose thing.
This is just a test run by one person using the wrong end of the cables for ease of access, we'll do the real run tomorrow.