I. Abouelfettouh, J. Kissel, O. Patane, B. Weaver
Executive Summary: The first article BBSS transfer functions look great. Though there is some confusion about the M1 P 2 P modeled transfer functions drastically disagreeing with the measured TFs, there is a consistent story between
- the adjustments to the mechanics that were made during construction and
- deviations from the "production" model parameter set that could re-create those construction adjustments.
Further discussion will be had with the assembly / design team as to the future course of action.
Kissel suggests that -- even as the first article stands now -- the resulting measured transfer functions with the mechanical adjustments would/should happily meet A+ O5 requirements.
%%%%%%%%%%% Begin kLOG (You missed these...) %%%%%%%%%%%%%%
I got a debrief yesterday from Betsy, Oli, and Ibrahim of the comparison between
- measured transfer function results from the first article construction and
- what had been deemed the production model parameter set for the BBSS,
i.e. what's discussed in LHO:75787.
The existing "production" model parameter set starts from Mark's update to the BBSS parameter set post-final-design after adjusting for the production wire thicknesses (see TripleLite2_mark.barton_20211212bbss_production_triplep.m, changed at rev 11625, circa Sep 2023). Oli successfully copied over to the usual matlab formating to create bbssopt.m (created at rev 11734, circa Jan 2024).
At the start of the debrief, there were (only!!) 3 outstanding issues / questions they had:
(1) The overall magnitude scale for all DOFS for all measured transfer functions was a consistent factor of ~3.15x more than the model estimates,
(2) After browsing through the EULER-basis drive to OSEM-basis response plots, and some of the off-diagonal EULER-basis showed little-to-no coherence, and
(3) The measured M1 Pitch to Pitch transfer function's frequency response was significantly different than the model.
For (1), this is typically a sign of a mis-calibration of the data. We reviewed the calibration of the measured data from the processing script, plotBBSS_dtttfs_M1.m, created by Oli and Ibrahim in Nov 2023. The DTT templates that measure the transfer function use the pre-calibrated output of the sensors for response channels i.e. the channels come in units of microns and microradians, so they only need a factor of 1e-6 [meters / micrometers]. The only substantial thing that needs calibrated into physical units during post-processing is the excitation. The review of the calibration of the exciation revealed nothing suspicious in the script based on our current expected knowledge of chain
- the test stand electronics (an 18-bit DAC = 20 / 2^18 [V/ct]),
- BBSS coil driver (a TTOP coil driver, coupled with a BOSEM coil = 11.9 [mA/V]),
- 10x10 magnet strength (1.694 [N/A]).
- (lever arms and numbers of actuators are pre-calibrated out via the EUL2OSEM matrix, generated by make_susbbss_projections..m, and installed in EPICs)
The above factors result in an overall calibration of 1 / 1.5405 [(m/N) / (um/DAC ct) or (rad/N.m) / [urad/DAC ct]] that's displayed in the legend of each of the plots from LHO:75787.
In the end, we were more interested in understanding (2) and (3) rather than getting to the bottom of the calibration. Further, the test stand is some old, pre-aLIGO concoction whose records and modifications are unclear. So we figure we just move on, accepting that we need to fudge the data by the extra factor of 3.15x. We'll get serious about figuring it out if there's still such a discrepancy after moving the BBSS over to the production H1 system.
For (2), all concerns can we waived off with expectations.
(a) The first plot of concern was the P to F1F2F3 plot (page 17 of 2024-01-05_1000_X1SUSBS_M1_ALL_TFs.pdf), in that the magnitude of the F2 and F3 TFs were low and/or noisy. This is expected because F2 and F3 OSEMs are along the (center of mass / axis of pitch rotation) of the BBSS's top mass. So they see no pitch by construction (for better or worse).
(b) The second collection of plots of concern were the off-diagonal DOFs,
(i) showing noise and/or
(ii) the opposite -- showing well-resolved cross-coupling in DOFs that we *don't* want cross-coupled.
We shouldn't be mad about (i) -- e.g. page 7 showing incoherence between L response to V drive and V response to L drive. What power is resolved in those transfer functions -- typically on/around resonances -- is because the TFs were taken undamped an in air. So there's just a ton of movement that an FFT might / cross-correlation might *think* is coherent with the drive, but it's really not.
We looked closer at any of the off-diagonal TFs that *were* resolved, (ii) -- e.g. page 9 showing well-resolved cross-coupling between R response to V drive and V response to R drive. In each of these TFs, we found that the magnitude of the cross-coupling, off-diagonal TF was less, if-not-MUCH less that the on-diagonal TF, which is good. Where it was close, it sort-of "is what it is." Little attention has been typically paid to mitigating the off-diagonal transfer functions during the design phase of LIGO suspensions to-date. Further, they often are a result of the unique construction of each individual instantiation of the suspension type. There's no much we can do about it post construction, and what we *do* do if it proves problematic to the detector, is dance around the problem with fancy controls techniques if needed.
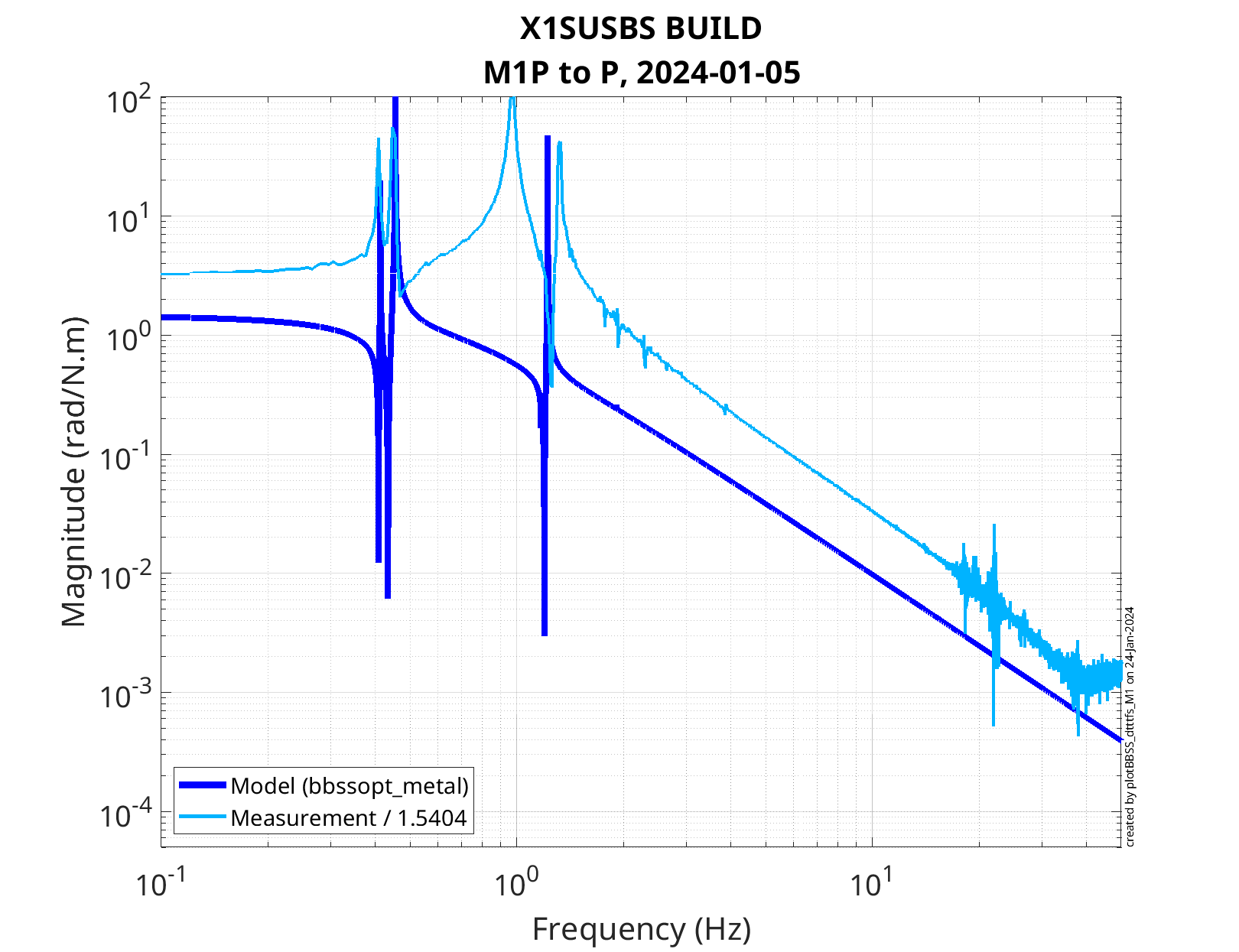
For (3), we arrive at the meat of this aLOG :: The *model* of the M1 Pitch to Pitch transfer function looked very weird to me. Betsy mentions the during the construction of the first article they
(a) found a discrepancy between the fastener model vs. measured mass budget that resulted in an unclear relationship between the center of mass of each stage and their suspension points (typically called the "d" parameters)
(b) acknowledged there would be uncertainty in the location of the suspension point for the bottom mass / dummy optic given the wire-loop + optic prism system since the final distances between masses have not been measured.
This, coupled with the fact that no *other* DOFs disagreed with the model besides P to P, led me to suspect the model parameters that only impact the pitch dynamics may be incorrect:
(i) each stages' separation between suspension point and center of mass, the "d" parameters, and
(ii) the pitch moments of inertia.
For a reminder of the physical meaning of all of the triple suspension parameters, see T040072.
As such, using the bbssopt.m "production" or "Final Design" (FD) parameter set as starting point, we tweaked these parameters by 10%-ish or factors of 2 to gather intuition of of how it would impact the response of the P to P transfer function. As a result, we have come to the conclusion that, in order to explain the data, we need to
- increase "d1" by + 5 [mm]. This is the separation between the top (M1) mass center of mass and it's M1 to to M2 blade tip heights. In the absolute sense, this is increasing the "physical" d1 from -0.5 [mm] to +4.5 [mm], and
- increase "d4" by 1.5 [mm]. This is the separation between the bottom (M3) mass / dummy optic center of mass and the wire/prism break-off point. In the absolute sense, this is increasing the "physical" d4 from +2.6 [mm] to +4.1 [mm].
Check out the attached plots which demonstrate this.
Citing discussion of overall scale (1) from above, all *measured* transfer functions have been scaled to the model by a factor of (1 / 3.15). This just makes comparing model to measured frequency response a lot more clear.
First attachment :: comparison between the final design model parameters and a variety of reasonable deviations of d1 between *decreased* by 2.5 [mm] and *increased by 5 [mm]. You'll notice that once d1 surpasses +1.0 [mm], the transfer function starts to look more like a standard triple suspension's transfer funtion. a d1 of FD + 5.0 [mm] lines up well with the upper two resonances of the measured data, but reduces the frequency of the lowest two L and P modes to below the data.
Second attachment :: comparison between the final design model parameters and a variety of reasonable deviations of d4. You'll notice that d4 really only have an impact on the lowest two L and P modes.
Third attachment :: comparison between the final design model parameters and a variety of reasonable deviations of the top (M1) mass' moment of inertia, the I1y parameter.
Fourth attachment :: comparison between the final design model parameters and a variety of reasonable deviations of the middle (M2) mass' moment of inertia, the I2y parameter.
Fifth attachment :: comparison between the final design model parameters and a variety of reasonable deviations of the bottom (M3) mass' moment of inertia, the I3y parameter.
None of the modeled changes to the moment of inertia -- shown in the third, fourth, and fifth attachments -- show promise in reproducing the measured results.
Sixth and Final attachment :: comparison between the final design model parameters and one with only d1 increased by +5 [mm], and d4 increased by +1.5 [mm].
The modified model in this last attachment fits the data the best, so we conclude that the issues with mechanical construction (3a) and (3b) are consistent with the measured data :: the reconfigured mass budget needed from fastener issues resulted in a deviation from design value for d1, and the imprecision of the mass-to-mass distances and wire-loop / prism system resulted in a roughly ~2 [mm] slop for this assembly.
%%%%%%%%%%% End kLOG (You missed these...) %%%%%%%%%%%%%%
Big Picture Systems Level Commentary by Jeff :: If these measured transfer functions end up being the reality of the final frequency response of the BBSS -- this will be totally fine. The pitch isolation one gets above the resonances (defined mostly by the moment of inertia) is the same, the lowest L and P modes are sufficiently low, and the details of where the rest of the resonances land are totally inconsequential / amenable to a damping and global control design.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Down for maintenance at 16:06 UTC